








Efektywna realizacja zadań przez zdalnie sterowane pojazdy działające w strefach zagrożenia zależna jest od zdolności do działania oddalonego operatora. Możliwe jest to przez opracowanie interfejsu umożliwiającego zdalną manipulację i zdalną percepcję. W referacie przedstawiono wyniki prac nad opracowaniem stacjonarnego stanowiska operatorskiego do realizacji długotrwałych prac wymagających precyzyjnego sterowania dwuczłonowym pojazdem wyposażonym w osprzęty manipulacyjny i załadowczy.
1. Wprowadzenie
Przeznaczeniem systemów zdalnego sterowania jest nie tylko odizolowanie operatora od oddziaływań środowiska, ale także dążenie do zwiększenia potencjału ludzkiego w zakresie zasięgu, siły lub precyzji działania. Zdolność do działania operatora i możliwość obserwacji skutków tego działania to dwa główne kryteria budowy interfejsu operatora dla systemów zdalnego sterowania. Zagadnienia wydajności systemów zdalnego sterowania pojazdami bezzałogowymi można podzielić na dwie kategorie: zdalnej percepcji i zdalnej manipulacji. Percepcja operatora w systemach zdalnego sterowania jest niepełna, ponieważ jest on oddalony od środowiska działania pojazdu.
Zdalną manipulację, czyli sterowanie osprzętem roboczym można podzielić na kilka grup: włącz/wyłącz; wspólna kontrola; skoordynowana kontrola; nadzór. Sterowanie włącz/wyłącz jest to sterowanie binarne, gdy operator aktywuje przesunięcie jednego lub kilku członów manipulatora lub narzędzia między dwoma określonymi położeniami lub wzdłuż określonej ścieżki ze stałą prędkością. Wspólna kontrola polega na bezpośrednim przemieszczeniu poszczególnych członów manipulatora. Skoordynowana kontrola polega na przemieszczaniu narzędzia po założonej trajektorii. Ten tryb sterowania wymaga rozwiązania odwrotnego zadania kinematyki manipulatora, w którym sterownik oblicza końcowe położenie jego członów i odpowiednią pozycję narzędzia. Jest on szczególnie odpowiedni dla początkujących operatorów. Sprawowanie nadzoru jest krokiem ewolucyjnym między konwencjonalną teleoperacją, gdzie operator musi stale kontrolować działanie manipulatora a pełną autonomią. Jednak w zdalnym sterowaniu, ze względu na charakter występujących zagrożeń i rodzaj środowiska działania, najpowszechniej stosowane jest sterowanie włącz/wyłącz.
Rozwój elementów automatyki i transmisji danych umożliwia budowę układów zdalnego sterowania ze zwiększonym poziomem autonomii, pozostawiając operatorowi zadanie nadzoru nad systemem. Jednak system percepcji operatora może ograniczać zwiększanie automatyzacji systemu. Jednym z rozwiązań może być projektowanie interfejsu operatora, który umożliwi, optymalnie wykorzystać działanie układu percepcji w celu zwiększenia możliwości rozpoznania otoczenia. Skuteczna realizacja takiego systemu spowoduje wzrost świadomości sytuacyjnej i zmniejszenie obciążenia poznawczego [5].
2. Badania stanowiskowe zdalnego sterowania osprzętem roboczym
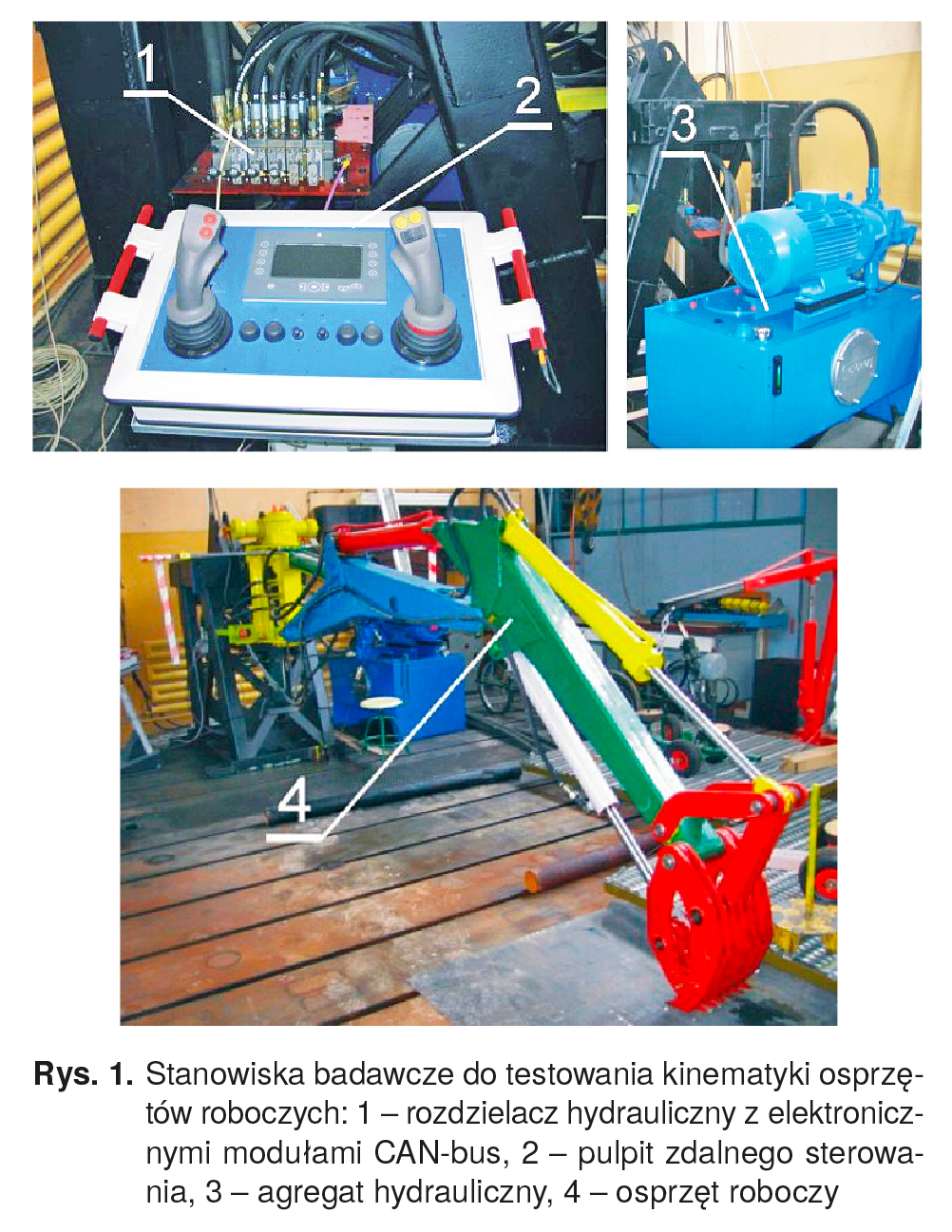
Badania zdalnego sterowania osprzętem roboczym przeprowadzono dla dwóch przypadków: przy bezpośredniej widoczności podejmowanych elementów z wykorzystaniem pulpitu zdalnego sterowania (rys. 1), jak również w układzie teleoperacji (rys. 2).
Według definicji teleoperacji [3], każdy obiekt, który odbiera i wykonuje polecenia operatora jest sterowany w systemie teleoperacji. Definicja ta kwalifikuje do tego rodzaju sterowania wszystkie obiekty zdalnie sterowane.
W referacie przyjęto definicję teleoperacji [5] mówiącą, że: obiekt kierowany w systemie teleoperacji powinien mieć dodatkowe układy, które odróżniają go od zdalnie sterowanego (czyli sterowanego w zasięgu wzroku operatora), a mianowicie:
––układ nawigacyjny, zapewniający przemieszczanie się w nieznanym lub zdewastowanym środowisku;
––układ sterowania osprzętem roboczym, napędem i jazdą. W wielu przypadkach wykonanie zadania jest bezpośrednio skorelowane z precyzją ruchów roboczych i jazdą;
––układ obserwacji otoczenia umożliwiający prawidłową ocenę danych o otoczeniu.
Wszystkie elementy wchodzące w skład pulpitu pracują w oparciu o magistralę CAN, co zapewnia ciągłą kontrolę nad stanem poszczególnych komponentów i precyzję działania. Dodatkowo możliwe jest podłączenie do pulpitu dwóch sygnałów wideo. Przesyłane są one z kamer na pulpit operatora w czasie rzeczywistym. Umożliwia to obserwację z niewielkiej odległości podejmowanego ładunku w celu zwiększenia precyzji realizowanych zadań [1].
Do badań oceny efektywności sterowania osprzętem roboczym, oprócz stanowiska zdalnego sterowania, wykorzystano stanowisko zdalnego sterowania w układzie teleoperacji. Składa się ono z dwóch części zainstalowanych w odrębnych pomieszczeniach: stanowiska operatorskiego oraz osprzętu roboczego. Osprzęt roboczy, wyposażony jest w specjalnej konstrukcji chwytak umożliwiający precyzyjne podejmowanie ładunków. Kamery zainstalowane wokół osprzętu zapewniają panoramiczny widok otoczenia, a kamera zamontowana w chwytaku – obserwację podejmowanych obiektów. Obraz z kamer wyświetlany jest na monitorach zainstalowanych na stanowisku operatora (rys. 2).
Badając właściwości manipulacyjne i efektywność działania układu sterowania, podejmowano przedmioty o różnej wielkości i masie, począwszy od prętów stalowych o średnicy od kilkunastu do kilkudziesięciu milimetrów i masie od kilku do kilkunastu kilogramów, przez ładunki wielkości pocisków artyleryjskich, do przedmiotów o masie i wielkości bomb lotniczych, czy typowych beczek o pojemności 200 dm3 (rys. 3).
Podnoszone i przemieszczane elementy układano na stalowej płycie podłoża w różnych odległościach od podstawy manipulatorów, w polu ich pracy w taki sposób, aby ich podniesienie wymagało także obrotu osprzętu roboczego. Zadanie polegało na przemieszczeniu manipulatora z położenia transportowego do ładunku, podniesieniu ładunku chwytakiem i przemieszczenie w położenie transportowe, przy różnych położeniach transportowych osprzętu [2].
Przeprowadzone badania sterowania osprzętem roboczym wykazały, że precyzyjniej i efektywniej operator steruje osprzętem roboczym za pomocą joysticków niż przycisków włącz/wyłącz, zarówno wciskanych, jak i uchylnych. Dlatego rozbudowano stanowisko sterowania o dwa joysticki umożliwiające sterowanie wszystkimi ruchami roboczymi sterowanego osprzętu roboczego (rys. 4).
3. Operatorskie stanowisko zdalnego sterowania pojazdem bezzałogowym
Przenośny pulpit zdalnego sterowania umożliwia sterowanie bezzałogowym pojazdem w krótkim okresie czasu (do ok. 1 godz.) [2]. Dłuższe sterowanie wymaga opracowania stanowiska zapewniającego operatorowi efektywną pracę przez kilka godzin. Dodatkowym utrudnieniem jest konieczność sterowania rozbudowanym układem jezdnym i skrętem pojazdów wieloczłonowych, z jednoczesnym sterowaniem osprzętem roboczym. Zadanie to było istotne dla zapewnienia sterowania bezzałogowym pojazdem do zadań w strefach zagrożenia „Boguś”. Wyposażony jest on w sterowany sprzęg hydrauliczny, manipulator oraz osprzęt samozaładowczy (rys. 5) [4].
Budowę stanowiska operatorskiego poprzedziła analiza wymagań oraz dostępnych rozwiązań z dziedziny sterowania w zastosowaniach mobilnych, oraz wnioski z realizacji wcześniejszych badań [4]. Wykazały one, że dla poprawnego sterowania bezzałogowym dwuczłonowym pojazdem operator powinien otrzymywać informacje z czterech podstawowych układów: napędowego, sprzęgu hydraulicznego, nadzoru osprzętów roboczych, pomiaru przemieszczania się pojazdu.
Na podstawie analiz teoretycznych i badań symulacyjnych opracowano i wykonano pulpit operatora zdalnego sterowania. Wyposażony jest on w cztery joysticki podłączone do wewnętrznego sterownika pulpitu, pełniącego jednocześnie funkcję wyświetlacza (rys. 6) [3]. Rozmieszczenie elementów interfejsu zostały wykonane zgodnie z zasadami ergonomii i normami dotyczącymi środowiska pracy operatorów sprzętu inżynieryjnego. Dzięki temu uzyskano intuicyjność w sterowaniu pojazdem.
Do sterowania pojazdem i osprzętem do załadunku i rozładunku wykorzystywane są joysticki grupy jazdy pulpitu operatora (rys. 7). Joystick lewy wychylany do przodu/do tyłu odpowiedzialny jest za sterowanie prędkością i kierunkiem jazdy, podczas gdy joystick prawy wychylany w lewą/w prawą stronę powoduje skręt kół, oraz skręt sprzęgu hydraulicznego. Sterowanie sprzęgiem hydraulicznym realizowane jest z wykorzystaniem tych samych joysticków i w połączeniu z ich przyciskami funkcyjnymi.
Taka forma sterowania zarówno pojazdem jak i osprzętem widłowym została zaproponowana ze względu na potrzebę korygowania kierunku podejścia i ustawienia osprzętu podczas podejmowania ładunków spaletyzowanych.
Pozostałe ruchy omawianych joysticków odpowiedzialne są za sterowanie osprzętem widłowym. Aby zrobić wypad lub schować widły należy wychylić joystick prawy do przodu lub do tyłu. W celu regulacji kąta nachylenia wideł, należy wychylić joystick lewy w prawo lub w lewo.
Do sterowania manipulatorem o sześciu stopniach swobody należy wykorzystywać joysticki grupy manipulacji (rys. 8).
W celu odwzorowania środowiska pracy pojazdu, wykorzystano trzy monitory o regulowanym położeniu wzdłużnym, dzięki czemu możliwe jest otrzymanie obrazu panoramicznego, który tworzy efekt „otaczania” operatora. W połączeniu ze specjalnie zaprojektowaną głowicą wizyjną zapewnia to dobrą widoczność podczas pracy przy małych zniekształceniach obrazu, co poprawia efektywność pracy operatora i zmniejsza jego zmęczenie podczas długotrwałej pracy.
Do wizualizacji informacji, przesyłanych z wewnętrznego systemu sterowania pojazdu, wykorzystano kolorowy wyświetlacz z zainstalowanym sterownikiem. Został on umiejscowiony centralnie przed operatorem, poniżej monitorów. Dzięki temu operator nie musi wykonywać długich i męczących ruchów głową, aby odczytać niezbędne informacje. Dodatkowo sterownik wyświetlacza pełni funkcję podstawowej jednostki logicznej dla przetwarzania danych przesyłanych po magistrali CAN na stanowisku operatora i realizuje komunikację z komputerem pokładowym pojazdu [3].
4. Podsumowanie
Przeprowadzone badania na stanowisku zdalnego sterowania, którego elementy adaptowano z eksploatowanego systemu nie zapewniło efektywnego sterowania pojazdem bezzałogowym pomimo zastosowania zasad ergonomii przy jego projektowaniu. Opracowanie nowatorskiego stanowiska kierowania, o rozbudowanej liczbie elementów manipulacyjnych zapewniło precyzyjne sterowanie pojazdem o rozbudowanej strukturze kinematycznej wyposażoną w osprzęty robocze o wielu stopniach swobody.
Obserwacja osprzętów roboczych i otoczenia pojazdu jest drugim obok manipulacji warunkiem zapewniającym poprawne działanie systemu zdalnego sterowania. W ramach pracy testowano różne rozwiązania prezentacji obrazu z kamer i informacji o parametrach pojazdu. Przeprowadzone badania wykazały, że najkorzystniejszym rozwiązaniem jest stosowanie trzech monitorów do wyświetlania obrazów z kamer z dodatkowym wyświetlaczem wizualizującym dane z pojazdu. Istotnym zagadnieniem okazał się dobór wielkości i rozmieszczenia monitorów. Zbyt duże monitory wymagają od operatora ruchów głową w celu oglądania obrazu z innej kamery. W sytuacjach wymagających skupienia korzystniejszym rozwiązaniem było rozmieszczenie wszystkich obrazów na jednym monitorze. Korzystnym rozwiązaniem jest umieszczenie wyświetlacza bezpośrednio pod centralnym monitorem. Umożliwia to operatorowi kontrolę stanu pojazdu bez wykonywania ruchów głową, a tylko gałkami ocznymi.
Przedstawione rozwiązanie badawczego układu komunikacji operator–pojazd stanowi podstawę do prowadzenia dalszych prac zarówno eksperymentalnych jak i koncepcyjnych. W przeprowadzonych rozważaniach wskazano na główne problemy, warunkujące realizację efektywnego układu zdalnego sterowania, tj. opracowanie systemów manipulacji i wizualizacji, które umożliwią sterowanie pracą pojazdu w czasie rzeczywistym przez przeciętnie wyszkolonego operatora.
Bibliografia
1. Bartnicki A., Łopatka M.J., Typiak A., Problemy teleoperacji w sterowaniu bezzałogowymi platformami lądowymi, [w:] Technologie podwójnego zastosowania. Praca zbiorowa pod red. A. Najgebauera, WAT, Warszawa 2012, s. 11–26.
2. Konopka S., Typiak R., Dobór systemu wizyjnego dla bezzałogowej szybkobieżnej maszyny inżynieryjnej, „Transport przemysłowy i maszyny robocze” 2(12)/2011.
3. Sheridian T.B., Supervisory control of remote manipulators, vehicles and dynamic processes. Experiments in command and display aiding, Massachusetts Institute of Technology, Cambridge 1983.
4. Typiak A. i in., Sprawozdanie z realizacji projektu rozwojowego Bezzałogowy pojazd do wykonywania zadań specjalnych w strefach zagrożenia. WAT, Warszawa 2011.
5. Typiak A., Sterowanie mobilnymi maszynami inżynieryjnymi w układzie teleoperacji. WAT, Warszawa 2013.












KOMENTARZE (0)
Do artykułu: Interfejs operatora pojazdu bezzałogowego działającego w strefach zagrożenia