








Rola stawów podatnych mechanicznie (w szczególności stawów o zmiennej podatności mechanicznej) w dziedzinie współczesnej robotyki - zwłaszcza społecznej i mobilnej - staje się coraz bardziej znacząca. Powodem są liczne korzyści płynące ze stosowania mechanizmów tego typu. Do tej pory opracowano wiele różnych metod osiągania podatności stawów i możliwości jej regulacji. W niniejszym opracowaniu podjęto próbę usystematyzowania zbioru istniejących rozwiązań. Przedstawiono w nim propozycję klasyfikacji stawów o zmiennej podatności mechanicznej oraz omówiono niektóre typy konstrukcji - mechanizmy sztywne z podatnością osiąganą przez sterowanie, mechanizmy podatne z regulacją podatności osiąganą przez sterowanie oraz mechanizmy wykorzystujące zmianę napięcia wstępnego nieliniowych elementów podatnych.
Większość aktualnie stosowanych manipulatorów stanowią mechanizmy sztywne, sterowane pozycyjnie. Tego typu układy zapewniają dużą precyzję ruchów, ale stanowią znaczne zagrożenie dla wszelkich obiektów, które nieoczekiwanie znajdą się w przestrzeni roboczej robota - w szczególności dla ludzi.
Niebezpieczeństwo to można zmniejszyć przez wprowadzenie podatności do przegubów robota. Zabieg ten nie tylko redukuje skutki zderzenia z przeszkodą (korzystnie wpływając na możliwość bezpośredniej współpracy robota z człowiekiem), ale pozwala również magazynować energię.
Możliwość płynnej regulacji podatności, w połączeniu z odpowiednim algorytmem sterowania, może przynieść szereg innych wymiernych korzyści - począwszy od zmniejszenia zużycia energii w trakcie powtarzalnych czynności manipulatora przemysłowego, a skończywszy na płynnym chodzie w przypadku robotów kroczących [1].
1.1. Motywacja i metodologia
Istnieje szereg zagranicznych prac o charakterze przeglądowym dotyczących różnych typów stawów o zmiennej podatności mechanicznej oraz prób ich klasyfikacji. Na liście artykułów tej tematyce figuruje wiele pozycji anglojęzycznych, jednak wciąż brakuje kompleksowych opracowań w języku polskim. Ten stan rzeczy stał się motywacją do powstania niniejszego artykułu.
Podstawę merytoryczną tego przeglądu stanowią przede wszystkim prace [2, 3]. Z pracy [2] zaczerpnięto podstawowy szkielet klasyfikacji stawów oraz część przykładów ich realizacji. Szczegóły podziału zaproponowanego w niniejszym opracowaniu różnią się od anglojęzycznych pierwowzorów. Oryginalną klasyfikację uzupełniono o grupę mechanizmów z elementem podatnym i regulacją sztywności przez sterowanie, zmodyfikowano kategorie stawów wykorzystujących zmianę pola przekroju w istocie ważna jest zmiana momentu bezwładności przekroju - oraz dodano kategorie stawów wykorzystujących zmianę innych parametrów sprężyny, co umożliwia uwzględnienie mechanizmów opartych na nieklasycznych elementach podatnych. Opracowania źródłowe wzbogacono również o dodatkowe przykłady konstrukcji - zarówno zagraniczne, jak i polskie.
1.2. Struktura artykułu
Artykuł - ze względu na znaczną objętość, wynikającą z mnogości istniejących rozwiązań - zdecydowano się podzielić na dwie części. W pierwszej zamieszczono objaśnienie pojęć związanych z impedancją mechaniczną (sek. 2), przedstawiono klasyfikację stawów o zmiennej podatności mechanicznej (sek. 3), wymieniono cechy idealnego mechanizmu regulacji sztywności (sek. 4), szczegółowo omówiono poszczególne kategorie stawów (sek. 5, 6, 7) - na rys. 2 zaznaczono je kolorem ciemnoszarym opisano ich przykładowych reprezentantów, rozważono wady zalety poszczególnych rozwiązań oraz zamieszczono podsumowanie ich cech (sek. 8). W części drugiej artykułu w analogiczny sposób opisano kategorie nieomówione w części pierwszej (na rys. 2 oznaczone kolorem białym).
2. Objaśnienie pojęć - impedancja mechaniczna
Przedstawiona klasyfikacja dotyczy stawów o regulowanej podatności mechanicznej, ale niekiedy zachodzi konieczność odwołania się do pojęcia szerszego - impedancji mechanicznej. W związku z tym poniżej przedstawiono krótkie objaśnienie terminów związanych z tą wielkością [4].
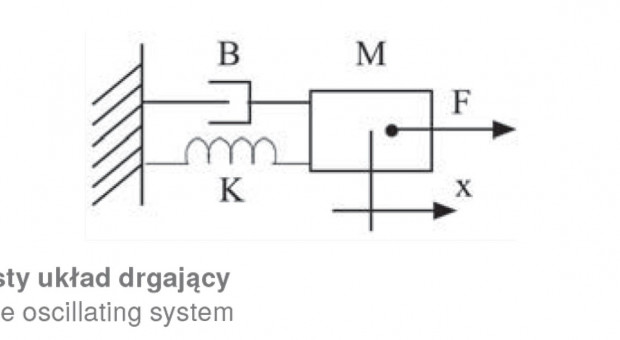
Sztywność K to wielkość fizyczna określająca zdolność ciała do przeciwstawiania się odkształceniu wywołanemu przez siłę zewnętrzną. Jej odwrotność nazywana jest podatnością. Typowym przykładem elementu podatnego jest sprężyna liniowa. W jej przypadku zależność między siłą zewnętrzną F a odkształceniem X opisuje wzór:
W układach drgających po ustaniu wymuszenia wprowadzenie tłumienia skutkuje wygasaniem oscylacji.
Bezwładność (inercja) M to zdolność ciała do podtrzymania stanu swojego ruchu. W przypadku ruchu postępowego jej miara jest masą, natomiast w ruchu obrotowym - moment bezwładności. Masa stanowi stałą proporcjonalności w II prawie dynamiki Newtona wiążącym ze sobą siłę F i przyspieszenie X.

Impedancja mechaniczna to wielkość, która opisuje jednocześnie trzy wymienione wcześniej cechy obiektu: sztywność, tłumienie i bezwładność. Określa ona, w jaki sposób w obiekcie mechanicznym transformowana jest siła F - przyłożona do niego w danym punkcie - w prędkość V. Zapisując wprowadzone powyżej zależności (1, 2, 3) w funkcji prędkości, dla prostego układu drgającego (rys. 1) otrzymuje się:

co w dziedzinie zmiennej zespolonej - po zastosowaniu transformaty Laplace’a - można wyrazić następująco:
Pierwszy jej składnik odpowiada sztywności, drugi tłumieniu, a trzeci bezwładności.
3. Klasyfikacja stawów o regulowanej podatności
Wśród stawów o regulowanej podatności mechanicznej można wyróżnić trzy główne grupy. Pierwszą stanowią stawy o relatywnie sztywnej konstrukcji, w których efektywna podatność i jej regulacja osiągane są drogą odpowiedniego sterowania. W stawach z drugiej grupy zastosowano dodatkowo rzeczywisty element podatny. Na grupę trzecią - najliczniejszą z wymienionych - składają się rozwiązania, w których zarówno podatność, jak i jej regulacja realizowane są mechanicznie. Zbiór ten można podzielić na dalsze podzbiory - w zależności od tego, jaki dokładnie parametr układu ulega zmianie w celu modyfikacji sztywności.
Pełną propozycję klasyfikacji przedstawiono na rysunku 2. Liczby w nawiasach oznaczają sekcje artykułu, w których omówiono poszczególne kategorie.
4. Idealna metoda regulacji podatności
Aby mieć możliwość rzetelnego porównania właściwości poszczególnych rozwiązań konstrukcyjnych stawów ze zmienną podatnością, należy najpierw określić, jakie cechy są pożądane, czyli czym charakteryzowałby się staw idealny.
Cechy idealnej metody regulacji podatności:
- proces zmiany sztywności nie wymaga dostarczania energii,
- jeżeli podpunkt 1) nie jest spełniony: sprawność procesu zmiany sztywności wynosi 100%1,
- utrzymanie sztywności na zadanym poziomie nie wymaga dostarczania energii,
- sztywność nie zależy od zewnętrznego obciążenia,
- osiągalny jest nieograniczony zakres sztywności (0-ro),
- mechanizm regulacji nie zwiększa bezwładności wyjścia,
- możliwość przechowania całej energii odkształcenia.
Niestety, jednoczesne spełnienie wszystkich wymienionych kryteriów nie jest możliwe (niektóre same w sobie są nieosiągalne), dlatego nie istnieje uniwersalna i idealna metoda regulacji podatności. Można jednak znaleźć konstrukcje optymalne dla określonych zastosowań [5].
5. Stawy sztywne z podatnością osiąganą przez sterowanie
Jednym ze sposobów realizacji podatności w przegubach manipulatora jest zastosowanie odpowiedniego sterowania. Na podstawie znajomości zadanej trajektorii oraz obciążenia można wyliczyć, jak odkształciłby się przegub o danej podatności w określonych warunkach i zrealizować takie samo przemieszczenie za pomocą układu sztywnego [3]. Podatność uzyskana w ten sposób często nazywana jest podatnością czynną. Ze względu na długą historię oraz udane zastosowania komercyjne, technika ta postrzegana jest jako dobrze poznana i rozwinięta [2]. Poniżej przedstawiono jej zalety i wady.
Do zalet metody należą:
- możliwość osiągniecia dowolnej impedancji mechanicznej - również składającej się z tłumienia i bezwładności,
- osiągalny szeroki zakres podatności,
- możliwość zadawania skomplikowanych charakterystyk sztywności i ich aktualizacji podczas pracy napędu,
- prosta konstrukcja mechaniczna.
Do wad metody należą:
- konieczność stosowania krótkich okresów regulacji - sterowania muszą być wyznaczane dużo szybciej niż trwa interakcja z obiektem,
- symulacja impedancji ograniczona do pasma przenoszenia układu sterowania,
- potrzeba stosowania czujników sił lub momentów sił cechujących się dużą czułością i zdolnością do wykonywania pomiarów z wysoką częstotliwością,
- brak możliwości gromadzenia energii - cała energia, która zostałaby zgromadzona w elemencie podatnym, w manipulatorze sztywnym ulega dyssypacji.
Manipulatory z podatnością czynną były rozwijane przez firmę DLR już od 1991 r. W 2004 r. projekt robota (rys. 3a) został kupiony przez firmę KUKA, która skomercjalizowała go konstruując robota LWR (rys. 3b) oraz jego następcę - iiwa (rys. 3c).
W odróżnieniu od innych konstrukcji produkowanych przez firmę KUKA, w manipulatorach LWR i iiwa wszystkie pary obrotowe napędzane są przez silniki umieszczone bezpośrednio w przegubach. Robot ten wyposażony jest w tensome- tryczne czujniki momentu siły (1) w każdej osi oraz czujniki pozycji ramienia (2) i wału silnika (5) (rys. 4). W połączeniu z odpowiednim układem sterowania pozwala to na realizację podatności mechanicznej wystarczająco dobrą i szybką, by robot dopuszczony był do pracy z ludźmi bez wyznaczonej strefy ochronnej [6].
Jezierski i Gmerek zaproponowali uniwersalny regulator impedancji do zastosowania w przegubach napędzanych silnikami elektrycznymi. Ich prace zademonstrowano w układzie wykorzystującym silnik bezszczotkowy przedstawionym na rys. 5 [9, 10].
6. Stawy z elementem podatnym i regulacją podatności przez sterowanie
Typowa realizacja stawu podatnego bez regulacji podatności polega na szeregowym dołączeniu elementu podatnego do napędu sztywnego SEA (ang. Series Elastic Actuator). Bazując na SEA można zbudować urządzenie, którego efektywna sztywność regulowana jest przez odpowiednie sterowanie - stosując metodę analogiczną do przedstawionej w poprzedniej sekcji. Wykorzystując dane o obciążeniu i położeniu końcówki można tak sterować położeniem równowagi elementu podatnego, aby uzyskać ruch odpowiadający innej wartości podatności niż cechuje układ mechaniczny pozbawiony sterowania [3, 11].
Do zalet metody należą:
- możliwość uwzględnienia nie tylko podatności, ale i pozostałych składników impedancji mechanicznej - tłumienia i bezwładności,
- obecność elementu podatnego zapewnia możliwość magazynowania energii i amortyzacji gwałtownego uderzenia,
- łatwy pomiar obciążenia bazujący na odkształceniu elementu podatnego,
- element podatny zmienia efektywne przełożenie mechanizmu, transmisyjnego2.
Do wad metody należą:
- element podatny zdolny jest do magazynowania energii jedynie w zakresie swojej konstrukcyjnej sztywności - pozostała część ulega dyssypacji,
- zmiana położenia równowagi wymaga dostarczenia energii,
- zakres możliwych do osiągniecia sztywności ograniczony jest przez szerokość pasma regulatora.
7. Stawy zregulacją podatności przez zmianę napięcia wstępnego sprężyny
W stawach z tej kategorii odpowiednia praca co najmniej dwóch silników pozwala na regulację położenia równowagi oraz napięcia wstępnego sprężyn. Najbardziej typowa jest konstrukcja antagonistyczna z dwoma elementami podatnymi. Inspiracją do jej powstania były układy biologiczne - w szczególności układ biceps-triceps w ludzkim ramieniu (rys. 7a i b). Kurczenie bicepsu przy jednoczesnym rozluźnieniu tricepsu skutkuje zginaniem ręki, odwrotna praca mięśni - jej prostowaniem. Jedną z możliwych przyczyn wykształcenia się takiego układu jest niezdolność mięśni do pchania. Konfiguracja tego typu ma również dodatkową zaletę - kurczenie obu mięśni z pary powoduje usztywnienie przegubu, a więc stanowią one napęd podatny z możliwością regulacji sztywności. Mechanizm analogiczny do układu biologicznego przedstawiono na rys. 7c (M1, M2 - silniki) [2, 3, 13].
Aby zmiana napięcia sprężyn skutkowała zmianą podatności, sprężyny muszą być nieliniowe [2, 3]. Poniżej w ślad za [3] przedstawiono krótki dowód.
Na rys. 8 przedstawiono blok umieszczony między dwiema sprężynami liniowymi. Siła F działająca na blok jest sumą sił pochodzących od obu sprężyn:
Wypadkowa sztywność K wynosi:

i jest całkowicie niezależna od wychylenia.
Aby uzależnić sztywność układu od napięcia sprężyn, należy zastosować sprężyny o charakterystyce nieliniowej. Jej postać zależeć będzie od zastosowania i zadanych właściwości mechanicznych układu. Często wygodne jest użycie sprężyn charakterystyce kwadratowej, ponieważ w ich przypadku zależność między sztywnością a wychyleniem jest liniowa:
Sposób konstrukcji sprężyn nieliniowych jest jednym z problemów projektowych, które różne zespoły rozwiązują na całkowicie odmienne sposoby. Zostaną one omówione w dalszej części opracowania (sekcja 7.2).
Wśród stawów z omawianej grupy można wskazać różne typy konstrukcji. Ich klasyfikację, ze względu na konfigurację sprężyn i napędów, omówiono w sekcji 7.1. Następnie, w sekcji 7.2, przedstawiono różne sposoby realizacji nieliniowych elementów podatnych. Wreszcie, w sekcji 7.3, zebrano przykłady urządzeń skonstruowanych zgodnie z poszczególnymi wzorcami omówionymi w sekcji 7.1 i wykorzystujących elementy przedstawione w sekcji 7.2.
7.1. Konfiguracje sprężyn i napędów
Wśród stawów, w których regulacja sztywności odbywa się przez zmianę napięcia wstępnego można wyróżnić trzy grupy - wykorzystujące [2]:
1. antagonistyczne sprężyny i antagonistyczne silniki - zarówno sprężyny, jak i silniki pracują w układzie przeciwstawnym. Zmiana sztywności odbywa się przez obrót silników w przeciwnych kierunkach, a przesuniecie punktu równowagi - przez obrót w tę samą stronę. Zastosowanie dwóch przeciwstawnych sprężyn o charakterystyce kwadratowej sprawia, że sztywność złącza nie zależy od kąta wychylenia.
2. antagonistyczne sprężyny i niezależne silniki - układ podobny do przedstawionego powyżej, z tą różnicą, że praca silników jest częściowo lub całkowicie rozprzęgnięta - jeden odpowiada za przesunięcie położenia równowagi, a drugi za zmianę sztywności.
3. pojedynczą sprężynę i niezależne silniki - układ nie jest antagonistyczny, wystarczy jedna sprężyna i dwa silniki - jeden przesuwający położenie równowagi, drugi modyfikujący napięcie wstępne.
Antagonistyczne sprężyny i antagonistyczne silniki
Na rys. 9 przedstawiono trzy przykładowe konfiguracje silników
sprężyn. Każda z nich wymaga, aby oba silniki (M1 i M2) pracowały synchronicznie. Ponieważ cięgna mogą pracować tylko na rozciąganie, w układzie jednokierunkowym (ang. uni- directional) - rys. 9a - maksymalny moment rozwijany przez przegub nie może być większy od momentów poszczególnych silników z pary, co więcej - jest on związany ze sztywnością i przy największych jej wartościach staje się zerowy.
Aby zapobiec utracie momentu przy maksymalnym napięciu, można zastosować trzeci element podatny - służący do połączenia cięgien - tworząc tym samym tzw. układ połączony (ang. cross-coupled) - rys. 9b. Napinając łącznik można dopasować zakres osiągalnych sztywności do stawianych wymagań.
Aby wykorzystać możliwości obu silników w pełni i dodatkowo zwiększyć maksymalny moment obrotowy, układ można zestawić zgodnie z rys. 9c, tworząc napęd dwukierunkowy (ang. bidirectional). Wówczas oba silniki są zdolne zarówno do ciągnięcia, jak i pchania, więc ich momenty sumują się.
Poniżej zestawiono zalety i wady stawów z antagonistycz- nymi sprężynami i silnikami.
Do zalet metody należą:
- możliwość przechowywania energii w elementach podatnych,
- możliwość pełnego wykorzystania możliwości dwóch silników (w układzie dwukierunkowym),
- układ regulacji sztywności nie wpływa na bezwładność wyjścia.
Do wad metody należą:
- skomplikowana konstrukcja podatnych elementów nieliniowych,
- konieczność synchronizacji silników,
- zakres położeń ograniczony przez długości łączników,
- ograniczony zakres sztywności (0 i - zmiana sztywności wymaga dostarczenia energii.
Antagonistyczne sprężyny i niezależne silniki
Napędy z tej grupy, przedstawione na rys. 10 skonstruowane są w taki sposób, aby przynajmniej częściowo rozprzęgnąć sterowanie pozycją i sztywnością.
W pierwszym układzie (rys. 10a) silnik M1 (którego baza podłączona jest do sprężyn) steruje pozycją, a M2 podatnością. Ich praca jest rozprzęgnięta jedynie częściowo, ponieważ po zmianie sztywności zmienia się położenie równowagi, co musi zostać skompensowane przez obrót silnika M1 w przeciwnym kierunku.
Konstrukcja przedstawiona na rys. 10b pozwala na całkowite uniezależnienie sterowania pozycją (silnik M1) od sterowania sztywnością (silnik M2). Aby częstości własne przegubu nie były obniżone przez bezwładność silnika M1, możliwe jest jego przeniesienie na nieruchomą część urządzenia (rys. 10c). Niestety, odbywa się to kosztem jego prostoty [2].
Poniżej podsumowano zalety i wady omawianych układów. Do zalet metody należą:
- możliwość przechowywania energii w elementach podatnych,
- rozprzęgnięte sterowanie pozycją i sztywnością,
- nieograniczony zakres pozycji.
Do wad metody należą:
- skomplikowana konstrukcja podatnych elementów nieliniowych,
- ograniczony zakres sztywności (zerowa3 i nieskończona - nieosiągalne),
- zmiana sztywności wymaga dostarczenia energii.
Pojedyncza sprężyna i niezależne silniki
Napędy z tej kategorii zawierają skrętny nieliniowy element podatny zbudowany z jednej sprężyny liniowej i odpowiedniego przełożenia (co zostało omówione w części poświęconej sprężynom nieliniowym). Silnik ustalający pozycję zamontowany jest na podatnej skrętnie podstawie, której sztywność regulowana jest przez silnik napinający sprężynę [2]. Poniżej przedstawiono zalety i wady takiej konstrukcji.
Do zalet metody należą:
- możliwość przechowywania energii w elementach podatnych,
- rozprzęgnięte sterowanie pozycją i sztywnością,
- nieograniczony zakres pozycji.
Do wad metody należą:
- skomplikowana konstrukcja nieliniowej sprężyny skrętnej,
- ograniczony zakres sztywności (0 i - zmiana sztywności wymaga dostarczenia energii,
- mechanizm może wpływać na bezwładność wyjścia.
7.2. Konstrukcje nieliniowych elementów podatnych
Nieliniowe elementy podatne wzdłużnie
W przypadku sprężyn pracujących na ściskanie osiągniecie nieliniowej charakterystyki możliwe jest przez zastosowanie zmiennego skoku (rys. 11a). W miarę skracania długości coraz więcej ciasno nawiniętych zwojów zaczyna się stykać, co sprawia, że stają się nieaktywne, a cały element - sztywniejszy [2].
Inną możliwością jest zastosowanie paska transmisyjnego i napierającego na niego elementu sprężystego (rys. 11b). Unieruchomienie lewego końca paska i przyłożenie obciążenia do prawego skutkuje przesunięciem środkowego bloczka ku dołowi i ściśnięciem liniowej sprężyny. Od kąta między paskiem a osią sprężyny zależy wartość składowej siły wymuszającej jej skracanie. Kąt ten zmienia się w miarę ściskania sprężyny i przemieszczenia prawego końca paska, co skutkuje zmianą efektywnej sztywności całego układu. Sztywność zależy od położenia, a zatem zależność siły napinającej pasek od przemieszczenia jest nieliniowa [2, 15].
Kolejną konstrukcję przedstawiono na rys. 11c. Tutaj pasek transmisyjny przerzucony jest przez dwa bloczki, których połączone sprężyną liniową osie mogą przemieszczać się wzdłuż odpowiednio ukształtowanego wycięcia w obudowie. Napięcie paska odsuwa od siebie bloczki napinając sprężynę, a kształt wycięcia sprawia, że charakterystyka całego elementu jest nieliniowa [2].
Podobna koncepcja zilustrowana jest na rys. 12a. Tu elementem kierującym są dwie krzywe powierzchnie, po których przetaczają się wałki połączone sprężyną liniową. Charakterystykę siły w funkcji przemieszczenia można określić, dobierając odpowiedni kształt powierzchni [2, 16].
Na rys. 12b przedstawiono układ złożony z czworoboku przegubowego i liniowej sprężyny skrętnej umieszczonej w jednej z par obrotowych. Sztywność z punktu widzenia skrajnego lewego przegubu (wyjściowego) zmienia się wraz z przełożeniem układu zależnym od aktualnej pozycji mechanizmu. Kształt charakterystyki można określić dobierając odpowiednie długości członów oraz modyfikując położenie równowagi sprężyny skrętnej [2].
Kolejną możliwością jest zastosowanie w roli napędu sztucznych mięśni (rys. 12c), czyli pneumatycznych urządzeń, które skracają się i poszerzają w miarę wzrostu ciśnienia. Kształt balonika sprawia, że zależność między siłą a długością jest nieliniowa [2]. W dziedzinie tej istnieją również polskie rozwiązania [17].
Na rys. 13 przedstawiono łatwy w wykonaniu układ podatny, którego schodkowa charakterystyka może być wpisana w wykres funkcji kwadratowej. Jest to rozwiązanie mało uniwersalne ze względu na immanentną nieciągłość [18].
Równie łatwy w wykonaniu jest układ zaprezentowany na rys. 14. Przez odpowiedni dobór wymiarów można uzyskać nieliniową charakterystykę układu o kształcie bardzo zbliżonym do funkcji kwadratowej [18].
Nieliniowe elementy podatne skrętnie
W mechanizmie pokazanym na rys. 15a położenie członu ustalane jest przez silnik M1 względem krótkiego ramienia, połączonego sprężyną z podstawą. Aby uzyskać charakterystykę nieliniową łącznik między ramieniem a sprężyną przerzucony jest przez odpowiednio ukształtowany element o przekroju przypominającym serce [2].
Na rys. 15b rozwinięto widok fragmentu obwodu przegubu podatnego. Górny i dolny element są wycięte z cylindra, którego oś na rysunku powinna być usytuowana pionowo. Ruch prawo-lewo wywoływany przez silnik M1 oznacza obrót urządzenia wokół osi pionowej. Na pewnym promieniu względem osi umieszczony jest układ złożony z dwóch kulek połączonych łącznikiem. Kulki te toczą się po krzywej powierzchni, powodując ruch górnego elementu w kierunku pionowym, skutkujący zmianą długości sprężyny liniowej.
Kształt powierzchni dobrany jest w taki sposób, by uzyskać właściwą charakterystykę momentu siły w funkcji obrotu. Napięcie sprężyny regulowane jest przez silnik M2. Podobną konstrukcję można zastosować w wariancie płaskim (ruchu postępowego). Jest to wówczas rozwiązanie koncepcyjnie niemal identyczne z mechanizmem przedstawionym na rys. 12a [2].
Mechanizm zaprezentowany na rys. 15c jest prawie taki sam jak na rys. 15b, z tą różnicą, że łącznik ustawiony jest pionowo [2, 5].
7.3. Przykłady urządzeń
Migliore i inni przedstawili jednokierunkowa konstrukcje anta- gonistyczna z nieliniowymi elementami bazującymi na krzywkach i wałeczkach połączonych sprężyną (rys. 16). Jest to połączenie koncepcji przedstawionych na rys. 9a i 12a [3, 16].
Bardzo podobna konstrukcja (rys. 17) posłużyła jako przykład w pracy przedstawiającej propozycję ujednolicenia dokumentacji przegubów o regulowanej podatności. Wspomniane urządzenie wykorzystuje mechanizm antagonistyczny dwukierunkowy (rys. 9c) z nieliniowymi sprężynami prawie identycznymi jak w przykładzie 1 [19].
Tonietti i inni przedstawili połączoną konstrukcję antagoni- styczną z nieliniowymi elementami bazującymi na odpychanym pasku transmisyjnym (rys. 18). Jest to połączenie koncepcji przedstawionych na rys. 9b i 11b. Silniki napędzają krążek 2 i 3, rolę nieliniowych sprężyn pełnią podukłady 2-8-1 oraz 3-9-1, a sprężyna 7 zapewnia odpowiedni naciąg paska. Zaletą tego rozwiązania jest bardzo zwarta konstrukcja [3, 15]. Podobny mechanizm skonstruowali Kordasz i inni [20].
Catalano i inni przedstawili napęd (rys. 19) o zasadzie działania zbliżonej do VSA. W tej konstrukcji zastosowano układ antagonistyczny jednokierunkowy. Podatnym elementem nieliniowym jest układ cięgno(1)-sprężyna(2). Dwa zewnętrzne koła obracane są przez silniki. Przy obrocie w tę samą stronę ich ruch skutkuje obrotem koła wyjściowego (w centrum). Obrót górnego koła zgodnie z ruchem wskazówek zegara, a dolnego w przeciwnym kierunku powoduje napinanie cięgien po lewej stronie i luzowanie po prawej, a w konsekwencji usztywnienie mechanizmu (rys. 19b) [21].
Hurst i inni przedstawili konstrukcję z antagonistycznymi sprężynami i rozprzęgniętymi silnikami. W roli nieliniowych elementów podatnych wykorzystano sprężyny giętne napinane za pomocą nici przełożonych przez spiralne bloczki (rys. 20). W miarę rozwijania nici ramię działania sił zmienia się w taki sposób, by otrzymać kwadratową charakterystykę sprężyn. Mechanizm jest zgodny z koncepcją przedstawioną na rys. 10c. Obrót silnika J1 powoduje zmianę położenia równowagi członu dołączonego do bloku J2, a przesunięcie X3 - napięcie sprężyn i zmianę sztywności. Zaletą tego rozwiązania jest rozprzęgniecie sterowania położeniem i sztywnością; wadą jest przede wszystkim duża złożoność oraz ograniczony zakres położeń [3, 22].
W centrum DLR opracowano urządzenie VS-Joint przedstawione na rys. 21. Zastosowano w nim trzy sprężyny (3) pracujące na ściskanie. Jest to przykład konstrukcji wykorzystującej skrętny nieliniowy element podatny. Utworzony on został zgodnie z ideą zaprezentowaną na rys. 15b [3, 23].
W tym samym centrum opracowano mechanizm (rys. 22) analogiczny do powyższego, różniący się głównie konstrukcją sprężyny nieliniowej (zgodna z rys. 15c) [24].
Na rys. 23 pokazano mechanizm, w którym do konstrukcji skrętnego nieliniowego elementu podatnego wykorzystano dwie krzywki (1, 2) i sprężynę liniową (3). Sprężyna zakończona jest walcem umieszczonym „w dolinie” między krzywkami (spodnia i wierzchnia). Od kąta f zależy trudność przemieszczania walca na boki, a tym samym obrotu ramienia wyjściowego. Położeniem krzywek sterują silniki. Ich zgodna praca skutkuje obrotem ramienia wyjściowego, przeciwstawna - zmiana kąta f, a w rezultacie - efektywnej sztywności. Koncepcja ta odpowiada konstrukcji antagonistycznej jednokierunkowej (krzywki mogą tylko popychać walec) z elementem podatnym bazującym na układzie sprężyna-bloczek-krzywka. Sztywności osiągane przez układ mieszczą się w zakresie od zera (poziome ustawienie krzywek) do wartości bliskich nieskończoności (pionowe ustawienie krzywek) [25].
8. Podsumowanie
Ze względu na mnogość rozwiązań i kryteriów oceny stawów
- zmiennej podatności mechanicznej, podsumowanie ich zalet
- wad przedstawiono w formie rozbudowanej tabeli [2, 3, 5].
Zestawienie to potwierdza tezę postawioną we wstępie - w ogólnym przypadku nie ma rozwiązań wyraźnie lepszych od pozostałych - wybór konkretnej konstrukcji będzie różnił się w zależności od wymagań stawianych układowi.
Stawy o regulacji podatności osiąganej przez sterowanie umożliwiają zadanie skomplikowanych charakterystyk sztywności, szybkie modyfikowanie ich w trakcie pracy i realizowanie innych składowych impedancji mechanicznej. Zalety te w połączeniu z możliwością wykorzystania mechanizmu sztywnego sprawiły, że jest to rozwiązanie najbardziej popularne w zastosowaniach komercyjnych. Ma ono istotną wadę - niezdolność do magazynowania i odzyskiwania energii odkształcenia sprężystego.
Pozbawione tej negatywnej cechy są stawy o konstrukcji antagonistycznej. Niestety wymagają one zastosowania nieliniowych elementów podatnych, co na ogół w istotnym stopniu komplikuje strukturę mechanizmu. Ponadto zmiana sztywności wymaga dostarczenia energii, a ze względu na napięcie wstępne sprężyn - w układzie mogą występować znaczne siły również przy braku obciążenia.
Cechy pozostałych typów stawów podatnych przedstawiono i porównano w drugiej części niniejszego artykułu.
Bibliografia
1. Vanderborght B., Albu-Schaeffer A., Bicchi A., Burdet E., Caldwell D., Carloni R., Catalano M., Ganesh G., Gara- bini M., Grebenstein M., Grioli G., Haddadin S., Jafari A., Laffranchi M., Lefeber D., Petit F., Stramigioli S., Tsagarakis N., Van Damme M., Van Ham R., Visser L.C., Wolf S., Variable impedance actuators: Moving the robots of tomorrow. 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, 5454-5455, DOI: 10.1109/IROS.2012.6385433.
2. Vanderborght B., Albu-Schaeffer A., Bicchi A., Burdet E., Caldwell D.G., Carloni R., Catalano M., Eiberger O., Friedl W., Ganesh G., Garabini M., Grebenstein M., Grioli G., Haddadin S., Hoppner H., Jafari A., Laffranchi M., Lefeber D., Petit F., Stramigioli S., Tsagarakis N., Van Damme M., Van Ham R., Visser L.C., Wolf S., Variable impedance actuators: A review. “Robotics and Autonomous Systems”, Vol. 61, Iss. 12, 2013, 1601-1614.
3. Ham R.V., Sugar T.G., Vanderborght B., Hollander K.W., Lefeber D., Compliant actuator designs. “IEEE Robotics Automation Magazine”, Vol. 16, Iss. 3, 2009, 81-94.
4. Winiarski T., Zieliński C., Podstawy sterowania siłowego w robotach. „Pomiary Automatyka Robotyka”, R. 12, Nr 6, 2008, 5-10. (Basics of robot force control (in Polish)).
5. Variable impedance actuators. http://www.birl.ethz.ch/ sssr2012/onlinematerial/AmirJafari.pdf (11.09.2016).
6. Albu-Schaeffer A., Haddadin S., Ott Ch., Stem- mer A., Wimboeck T., Hirzinger G., The DLR light- weight robot: Design and control concepts for robots in human environments. “Industrial Robot: An International Journal”, Vol. 34, Iss: 5, 2007, 376-385, DOI: 10.1108/01439910710774386.
7. http://vr.cs.ucl.ac.uk/facilities/touch-lab/ (11.09.2016).
8. http://red-dot.de/pd/onlineexhibition/work/?code=17- 01115-201&y=2014&c=168&a=0&lang=en (11.09.2016).
9. Jezierski E., Gmerek A., Impedance controllers for elec- tric-driven robots. “Journal of Automation, Mobile Robotics & Intelligent Systems”, Vol. 7, No. 4, 2013, 13-20.
10. Gmerek A., Jezierski E., Admittance control of a 1-DoF robotic arm actuated by BLDC motor. [in:] 17th International Conference on Methods and Models in Automation and Robotics (MMAR), 2012, 633-638.
11. Sugar T.G., A novel selective compliant actuator. “Mecha- tronics”, Vol. 12, Iss. 9-10, 2002, 1157-1171.
12. Knox B.T, Schmiedeler J.P., A unidirectional series-elas- tic actuator design using a spiral torsion spring. Journal of Mechanical Design, Vol. 131, Iss.. 12,125001, 2009, DOI: 10.1115/1.4000252.
13. Tagliamonte N.L., Sergi F., Accoto D., Carpino G., Gug- lielmelli E., Double actuation architectures for rendering variable impedance in compliant robots: A review. “Mecha- tronics”, Vol. 22, Iss. 8, 2012, 1187-1203, DOI: 10.1016/j.mechatronics.2012.09.011.
14. http://www.runtolivehealthy.com/2012/06/advance- darms-workout.html (11.09.2016).
15. Tonietti G., Schiavi R., Bicchi A., Design and control of a variable stiffness actuator for safe and fast physical human/robot interaction. [in:] Proceedings of the 2005 IEEE International Conference on Robotics and Automation, April 2005, 526-531, DOI: 10.1109/ROBOT.2005.1570172.
16. Migliore S.A., Brown E.A., DeWeerth S.P., Biolog- ically inspired joint stiffness control. Proceedings of the 2005 IEEE International Conference on Robotics and Automation, 2005, 4508-4513, DOI: 10.1109/ROBOT.2005.1570814.
17. Podsędkowski L., Koter K., Woźniak M., Badanie charakterystyk mini muskułów pneumatycznych do napędu robota. „Prace Naukowe Politechniki Warszawskiej. Elektronika”, Z. 194, T. 2, 2014, 601-610.
18. Jishu Guo, Guohui Tian, Conceptual design and analysis of four types of variable stiffness actuators based on spring pretension. “International Journal of Advanced Robotic Systems”, 12, 2015.
19. Grioli G., Wolf S., Garabini M., Catalano M., Burdet E., Caldwell D., Carloni R., Friedl W., Grebenstein M., Laffranchi M., et al., Variable stiffness actuators: The user’s point of view. “The International Journal of Robotics Research”, Vol. 34, Iss. 6, 2015, 727-743.
20. Kordasz M., Madoński R, Sauer P., Kozłowski K., Zastosowanie odpornego sterowania siłowego w manipulatorze rehabilitacyjnym. „Prace Naukowe Politechniki Warszawskiej. Elektronika”, Z. 182, T. 1, 2012, 91-102.
21. Catalano M.G., Grioli G., Garabini M., Bonomo F., Mancini M., Tsagarakis N., Bicchi A., Vsa-cubebot: A modular variable stiffness platform for multiple degrees of freedom robots. 2011 IEEE International Conference on Robotics and Automation (ICRA), 5090-5095.
22. Hurst J.W., Chestnutt J.E., Rizzi A.A., The actuator with mechanically adjustable series compliance. IEEE Transactions on Robotics, Vol. 26, Iss. 4, 2010, 597-606, DOI: 10.1109/TRO.2010.2052398.
23. Wolf S., Hirzinger G., A new variable stiffness design: Matching requirements of the next robot generation, IEEE International Conference on Robotics and Automation, ICRA 2008, 1741-1746, DOI: 10.1109/ROBOT.2008.4543452.
24. Wolf S., Eiberger O., Hirzinger G., The DLR FSJ: Energy based design of a variable stiffness joint. 2011 IEEE Inter- national Conference on Robotics and Automation (ICRA), 5082-5089, DOI: 10.1109/ICRA.2011.5980303.
25. Ki-Hoon Nam, Byeong-Sang Kim, Jae-Bok Song, Compliant actuation of parallel-type variable stiffness actuator based on antagonistic actuation. “Journal of Mechanical Science and Technology”, Vol. 24, Iss. 11, 2010, 2315-2321, DOI: 10.1007/s12206-010-0813-6.












KOMENTARZE (0)
Do artykułu: Klasyfikacja stawów o zmiennej podatności mechanicznej - część 1